ТэСФЈәЛЕ·юО»ЦГҝШЦЖКЗ№ӨҳI(yЁЁ)ЧФ„У»ҜоI(lЁ«ng)УтҪӣ(jЁ©ng)іЈУцөҪөДҝШЦЖРиЗуЈ¬Я^ИҘҪӣ(jЁ©ng)өдөДҪвӣQ·Ҫ°ёКЗУГЯ\„УҝШЦЖДЈүK°l(fЁЎ)ЛНГ}ӣ_РЕМ–ҝШЦЖІҪЯM»тЛЕ·ютҢ(qЁұ)„УПөҪy(tЁҜng)��ЎЈө«КЗлSЦшЙъ®a(chЁЈn)әНјјРg(shЁҙ)°l(fЁЎ)Х№���Ј¬ЛЕ·ютҢ(qЁұ)„У№ҰВКФҪҒнФҪҙу��Ј¬ҝШЦЖ·Ҫ·ЁТІЦрІҪҸДГ}ӣ_ҝШЦЖЧғ?yЁӯu)йёЯЛЩНЁУҚҝШЦЖЎЈөӨ·рЛ№Я\„УҝШЦЖЖчДЬЕcтҢ(qЁұ)„УЖчәНёч·N¬F(xiЁӨn)ҲцҝӮҫҖНЁУҚҝЁҫoГЬҪY(jiЁҰ)әП���Ј¬һйУГ‘фМṩБЛҝЙҫҺіМй_·ЕКҪөДНЁУҚҝШЦЖҪУҝЪ�����Ј¬КЗДҝЗ°КРҲцЙПРФғrұИЧоёЯөДНЁУГЯhіМЛЕ·юҝШЦЖ№ӨЧчХҫЦ®Т»��ЎЈ
ХӘ ТӘЈәДҝЗ°Йъ®a(chЁЈn)ЦРУГөҪөДЭ^ПИЯMөДЛЕ·юҝШЦЖПөҪy(tЁҜng)НЁіЈІЙУГҢЈУГөДЯ\„УҝШЦЖДЈүK�Ј¬јУЙПҢЈУГөДёЯЛЩНЁУҚҝӮҫҖ����Ј¬ФЩјУЙПҢЈУГөДЛЕ·ютҢ(qЁұ)„УПөҪy(tЁҜng)ҪMіЙЎЈө«КЗИз№ыТФөӨ·рЛ№Я\„УҝШЦЖЖчЧчһйЯhіМЛЕ·юҝШЦЖ№ӨЧчХҫЈ¬„tНщЙПДЬЯmЕдКРҲцЙПҺЧәхИ«ІҝЦчБчёЯЛЩ¬F(xiЁӨn)ҲцҝӮҫҖ�Ј¬јҙЯmУГУЪИОТвЙПО»ҷCЈ»НщПВЯmЕдИОТвН¬ІҪ»т®җІҪЛЕ·юлҠҷC����ЎЈұҫОДЦ”ТФEpsilon SWB °l(fЁЎ)ЕЭДЈҷC4ЭSО»ЦГЛЕ·юҝШЦЖһйАэЈ¬ҪйҪBБЛөӨ·рЛ№Я\„УҝШЦЖЖчЧчһйЯhіМЛЕ·юҝШЦЖ№ӨЧчХҫөД‘Ә(yЁ©ng)УГЮk·ЁәНҪӣ(jЁ©ng)тһ���ЎЈ
кP(guЁЎn)жIФ~Јә ЛЕ·юҝШЦЖ ¬F(xiЁӨn)ҲцҝӮҫҖНЁУҚ ®җІҪЛЕ·юлҠҷC ҷCРөұ§йlҝШЦЖ
Т»�Ўў Epsilon SWB°l(fЁЎ)ЕЭДЈҷCЯ\„УҝШЦЖТӘЗуЈә
УТҲDһйEpsilon SWB°l(fЁЎ)ЕЭДЈҷCөД»щұҫҷCРө
ҪY(jiЁҰ)ҳӢ(gЁ°u)ҲD�ЎЈ
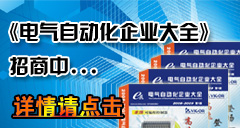
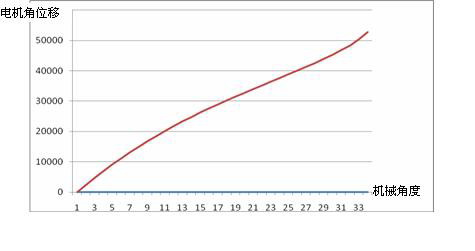
Ф“ҷCУРЙПДЈ·ӯЮD(zhuЁЈn)ЎўПВДЈ·ӯЮD(zhuЁЈn)���ЎўХыуw·ӯЮD(zhuЁЈn)3
ӮҖҪЗ¶ИО»ЦГҝШЦЖәНЙПДЈЙэҪөТ»ӮҖҙ№ЦұО»ЦГҝШЦЖ�����Ј¬
¶ЁО»ҫ«¶ИТӘЗу¶јәЬёЯ��ЎЈЖдЦРЙПДЈқMЭd•rЦШЯ_°лҮҚ��ЎЈ
лҠтҢ(qЁұ)„УұШнҡҢҚ¬F(xiЁӨn)ІўқMЧгИзПВТӘЗуЈә
1. °l(fЁЎ)ЕЭДЈҷCФЪҷCРөЙПһйҢҰ·QҪY(jiЁҰ)ҳӢ(gЁ°u)���Ј¬ЙПДЈЙэҪө��ЎўПВДЈ·ӯЮD(zhuЁЈn)әНХыуw·ӯЮD(zhuЁЈn)Я@ИэӮҖ»щұҫ„УЧч¶јКЗУЙғЙЯ…ғЙЕ_лҠҷCН¬•rтҢ(qЁұ)„УөД��Ј¬лҠҷCәНңpЛЩҷCҳӢ(gЁ°u)РНМ–ТҺ(guЁ©)ёсНкИ«ПаН¬�����ЎЈЯ@ҳУИзәОК№ғЙЕ_„ӮРФЯBҪУөДлҠҷCЭ”іцЮD(zhuЁЈn)ЛЩЭ”іцЮD(zhuЁЈn)ҫШұЈіЦТ»ЦВ�Ј¬КЗлҠҡвтҢ(qЁұ)„УРиТӘҪвӣQөДлyо}Ц®Т»��ЎЈ
Из№ыК№УГН¬ІҪЛЕ·юлҠҷC����Ј¬Я@ҢўКЗТ»ӮҖ·ЗіЈА§лyөДҝШЦЖТӘЗу��Ў����ЈҝЙРРөДЮk·ЁһйБоЖдЦРТ»Е_Н¬ІҪЛЕ·юлҠҷCЧчЦчҷCЈ¬№ӨЧчУЪЛЩ¶ИЈЁО»ЦГЈ©ДЈКҪ���Ј»БнТ»Е_Н¬ІҪЛЕ·юлҠҷCЧчЭoҷC���Ј¬№ӨЧчУЪЮD(zhuЁЈn)ҫШДЈКҪЈ¬ЖдЮD(zhuЁЈn)ҫШҪo¶ЁЦөһйЦчЛЕ·юлҠҷCөДЭ”іцЮD(zhuЁЈn)ҫШЦөЎЈ
ө«КЗИз№ыК№УГ®җІҪЛЕ·юлҠҷC��Ј¬УГТ»Е_ЛЕ·ютҢ(qЁұ)„УЖчН¬•rтҢ(qЁұ)„УғЙЕ_лҠҷC�����Ј¬АыУГ®җІҪлҠҷCөД№МУРМШРФ���Ј¬ҝЙТФ·ҪұгөШҢҚ¬F(xiЁӨn)ЮD(zhuЁЈn)ЛЩН¬ІҪ����Ј¬ІўЗТЮD(zhuЁЈn)ҫШЭ”іцТ»ЦВ���ЎЈУТҲDһйҙЛ·NЯ\РРДЈКҪ•rғЙЕ_лҠҷCөДЭ”іцЮD(zhuЁЈn)ҫШ����Ј¬ҝЙТҠЭ”іцЮD(zhuЁЈn)ҫШөДІ»ЖҪәвКЗУЙУЪлҠҷCөДЮD(zhuЁЈn)ҫШ-ЮD(zhuЁЈn)ІоМШРФІ»Н¬ФміЙөД����Ј¬Я@ӮҖҶ–о}ҝЙТФУГЯx“сПаН¬ҸSјТПаН¬РНМ–лҠҷCөДЮk·ЁҪвӣQЈ¬¶шЗТЧоәГКЗЯxо~¶ЁЮD(zhuЁЈn)ІоұИЭ^ҙуөД®җІҪлҠҷC�����ЎЈ
өӨ·рЛ№FC302тҢ(qЁұ)„УЖчДЬүтН¬•rҺ§ғЙЕ_®җІҪЛЕ·юлҠҷCЈ¬ЧчлҠҷCЧФЯm‘Ә(yЁ©ng)•rЦ»ТӘҢўлҠҷC№ҰВК��ЎўлҠҷCлҠБчФO(shЁЁ)һй2Е_®җІҪЛЕ·юлҠҷCөДҝӮәПҫНҝЙТФБЛ����ЎЈ
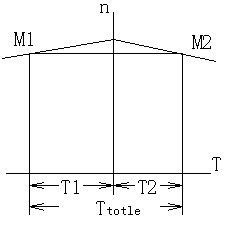
2. ҷCРөұ§йlҝШЦЖ
ЙПДЈ·ЗіЈЦШЈ¬Жр„У•rИз№ытҢ(qЁұ)„УЖчәНҷCРөұ§йlЕдәПІ»әГ����Ј¬әЬИЭТЧПВБп»тЙПӣ_ЎЈ
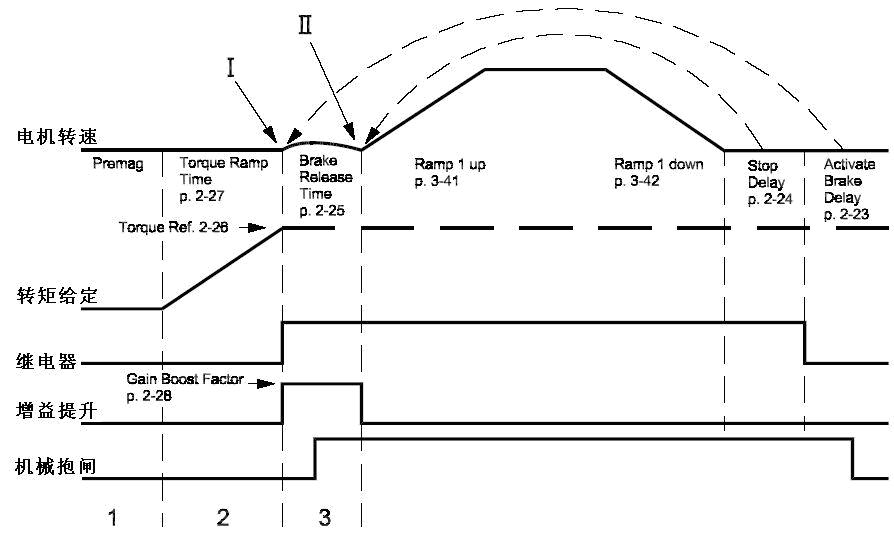
өӨ·рЛ№FC302тҢ(qЁұ)„УЖчғИ(nЁЁi)ЦГЖрЦШФO(shЁЁ)ӮдҢЈУГөДҷCРөұ§йlҝШЦЖЭ”іц���Ј¬ЙПҲDһйЖд„УЧчөД•rРтҲD��Ј¬лҠҷCЖр„УЦ®іхКЗ№ӨЧчУЪЮD(zhuЁЈn)ҫШЭ”іц·ҪКҪөД���Ј¬ФЪҷCРөұ§йlЦрІҪЛЙй_өДЯ^іМЦРЈ¬лҠҷCҝШЦЖДЈКҪТІЖҪ»¬өШҸДЮD(zhuЁЈn)ҫШҝШЦЖДЈКҪЮD(zhuЁЈn)“QһйЮD(zhuЁЈn)ЛЩҝШЦЖДЈКҪ���ЎЈФЪЯ^¶ЙЖЪйgЈ¬ЯҖҝЙТФМбЙэЮD(zhuЁЈn)ЛЩҝШЦЖөДPID��Ј¬УРЦъУЪЯMТ»ІҪМбёЯтҢ(qЁұ)„УЖчөДШ“Эdн‘‘Ә(yЁ©ng)ДЬБҰ��ЎЈ
3. ПВДЈ·ӯЮD(zhuЁЈn)әНХыуw·ӯЮD(zhuЁЈn)КЗНЁЯ^ЗъұъҷCҳӢ(gЁ°u)ҢҚ¬F(xiЁӨn)өДЈ¬ТтҙЛҢҚлHҷCРөҪЗ¶ИЕcлҠҷCҪЗО»ТЖКЗ·ЗҫҖРФкP(guЁЎn)Пө
Я@ТӘҝҝЯ\„УҝШЦЖЖчғИ(nЁЁi)ІҝЯ\Лг»тУГІйұнІеЦөЯ\ЛгөДЮk·ЁҪвӣQ��ЎЈ
¶ю���Ўў Я\„УҝШЦЖөДёЯЛЩҝӮҫҖНЁУҚҪУҝЪіМРтҫҺЦЖәН¶ЁБxЈә
¬F(xiЁӨn)ҲцҝӮҫҖНЁУҚҝШЦЖФЪЦчХҫәНҸДХҫЦ®йgӮчЯfоA(yЁҙ)¶ЁЧЦйLөДЯ^іМ”ө(shЁҙ)“ю(jЁҙ)��Ј¬өӨ·рЛ№Я\„УҝШЦЖЖчФЪ¬F(xiЁӨn)ҲцҝӮҫҖҫW(wЁЈng)Ҫj(luЁ°)ЦРЧчһйЯhіМЛЕ·юҝШЦЖ№ӨЧчХҫЯ\РР����Ј¬ҝШЦЖГьБоөДҲМ(zhЁӘ)РРәНҢҚлHО»ЦГ��Ўў о‘B(tЁӨi)өД·ҙрҒИ«ҝҝЯ^іМ”ө(shЁҙ)“ю(jЁҙ)Ҫ»»ҘҢҚ¬F(xiЁӨn)�ЎЈһйБЛ·ҪұгЕcЖдЛыЦчҷCөДг•ҪУЈ¬ФЪ…ўҝјБЛОчйTЧУFMПөБРЯ\„УҝШЦЖДЈүKөДҝШЦЖЮk·Ё����Ј¬ФЩҪY(jiЁҰ)әП¬F(xiЁӨn)ҲцҝӮҫҖөДҝШЦЖМШьcЈ¬¶ЁБxБЛИзПВЯ^іМ”ө(shЁҙ)“ю(jЁҙ)Јә
ұнТ»ЈәЯ^іМ”ө(shЁҙ)“ю(jЁҙ)PCD¶ЁБx
PCD1 PCD2 PCD3 PCD4
Ң‘Ил ҝШЦЖЧЦ ЛЩ¶ИҪo¶Ё О»ЦГҪo¶Ё ЮD(zhuЁЈn)ҫШҪo¶Ё
Чxіц о‘B(tЁӨi)ЧЦ ®”З°ҢҚлHЛЩ¶И ®”З°ҢҚлHО»ЦГ ®”З°ҢҚлHЮD(zhuЁЈn)ҫШ
ЖдЦРҝШЦЖЧЦ¶ЁБxИзПВЈә
ұн¶юЈәҝШЦЖЧЦ¶ЁБx
О» О» = 0 О» = 1
0 ЧФУЙЯ\РР ЛЕ·южi¶Ё
1 ХэЮD(zhuЁЈn) ·ҙЮD(zhuЁЈn)
2 ьc„У
3 ЮD(zhuЁЈn)ЛЩҝШЦЖДЈКҪ
4 ЮD(zhuЁЈn)ҫШҝШЦЖДЈКҪ
5 ПаҢҰ¶ЁО»ҝШЦЖДЈКҪ
6 Ҫ^ҢҰ¶ЁО»ҝШЦЖДЈКҪ
7 »ШБгО»
8 №КХПҸН(fЁҙ)О»
9 „УЧчНкіЙҳЛЦҫЗеіэ
10-15 ұЈБф
о‘B(tЁӨi)ЧЦ¶ЁБxИзПВЈә
ұнИэЈә о‘B(tЁӨi)ЧЦ¶ЁБx
О» О» = 0 О» = 1
0 ҹoХэЮD(zhuЁЈn)ПЮО»РЕМ– ХэЮD(zhuЁЈn)ПЮО»РЕМ–„УЧч
1 ҹo·ҙЮD(zhuЁЈn)ПЮО»РЕМ– ·ҙЮD(zhuЁЈn)ПЮО»РЕМ–„УЧч
2 ҷCРөЦЖ„Уұ§ҫo ҷCРөЦЖ„УбҢ·Е
3 Я\„УЯ^іМЦР „УЧчНкіЙ
4 тҢ(qЁұ)„УПөҪy(tЁҜng)ХэіЈ тҢ(qЁұ)„УПөҪy(tЁҜng)ҲуҫҜ
5 Я\„УҝШЦЖЖчҝШЦЖҫНҫw
6 »ШБгО»НкіЙ
7-15 ұЈБф
Иэ���Ўў өӨ·рЛ№Я\„УҝШЦЖЖчәҶҪйЈә
өӨ·рЛ№Я\„УҝШЦЖЖчКЗЕcөӨ·рЛ№өДFC300ПөБРтҢ(qЁұ)„УЖчҫoГЬ
ҪY(jiЁҰ)әПөД��Ј¬ЖдҪУҝЪИзУТҲDЛщКҫЈә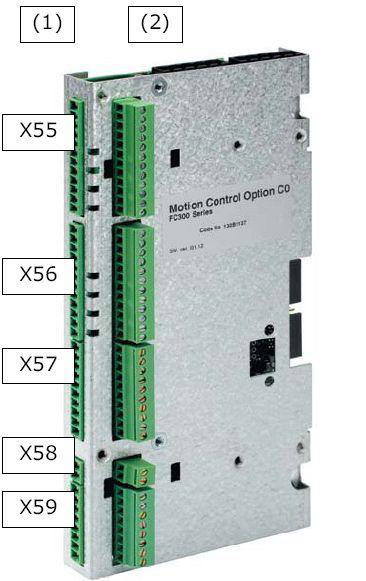
X55һйҫҺҙaЖч2Э”ИлҪУҝЪ�Ј¬ИұКЎУГУЪЯBҪУҸДлҠҷCҫҺҙaЖч��Ј»
X56һйҫҺҙaЖч1Э”ИлҪУҝЪЈ¬ИұКЎУГУЪЯBҪУЦчлҠҷCҫҺҙaЖч���Ј»
X57һй10”ө(shЁҙ)ЧЦБҝЭ”ИлҪУҝЪ���Ј»
X58һй24VDCлҠФҙЈ»
X59һй8”ө(shЁҙ)ЧЦБҝЭ”іцҪУҝЪ�����ЎЈ
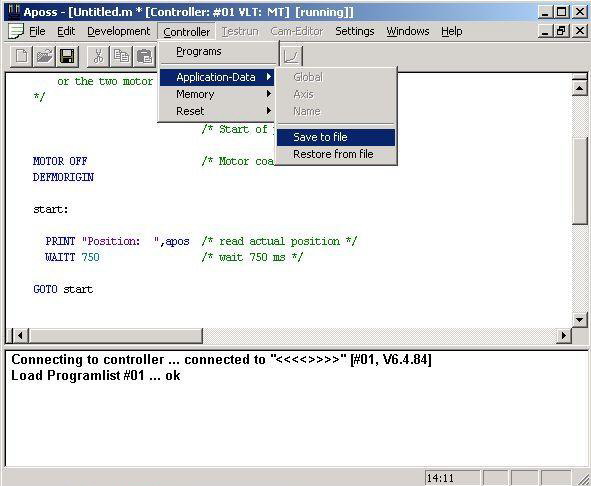
өӨ·рЛ№Я\„УҝШЦЖЖчөДҫҺіМ·ҪКҪ
өӨ·рЛ№Я\„УҝШЦЖЖчК№УГөӨ·рЛ№№«Лҫй_°l(fЁЎ)өДApossЯ\„УҝШЦЖХZСФ�Ј¬ЖдҫҺіМпLёсДЈ·ВCХZСФЈ¬ІўМṩ¶а·NұгАыЦёБо����Ј¬ЖдҪзГжИзПВҲDЛщКҫЈә
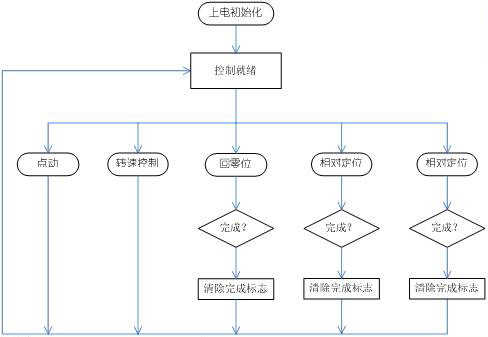
1 ЖХНЁКЈУалҠБчұЈЧoЖч№ӨЧчФӯАн
өӨ·рЛ№Я\„УҝШЦЖЖчДЬМṩИзПВ»щұҫ№ҰДЬЈә
1Ј® Э”ИлЭ”іцЯүЭӢҝШЦЖ№ҰДЬЈ»
2Ј® Н¬ІҪҝШЦЖ№ҰДЬ����Ј¬лҠЧУН№ЭҶЈ»
3Ј® ¶ЁО»ҝШЦЖ№ҰДЬ�����Ј»
4Ј® ЦР”а№ҰДЬ����Ј¬Из•rйgЦР”аЈ¬I/OЦР”аөИ�����Ј»
5Ј® »щұҫ”ө(shЁҙ)ҢW���ЎўЯүЭӢЯ\Лг№ҰДЬ���Ј»
ЎӯЎӯ
өӨ·рЛ№Я\„УҝШЦЖЖчЦ§іЦөДёЯЛЩНЁУҚ…f(xiЁҰ)ЧhЈә
ProfibusЎўCANopen����ЎўDeviceNetЎўInterbus��ЎўLonWorks��Ўў№ӨҳI(yЁЁ)ТФМ«ҫW(wЁЈng)
ЎӯЎӯ
өӨ·рЛ№Я\„УҝШЦЖЖчіМРтАэЈЁІҝ·ЦЈ©Јә
//HOME MODE 1
IF (step==16) THEN
homevel = GET HOME_VEL
IF (home_done==0) THEN
servo_on = 1
IF (svon_dlyt.2==1) THEN
IF (homevel>0 AND ls_fwd==0) OR (homevel<0 AND ls_rev==0) THEN
IF (home_dog==1) THEN
CSTOP //CVEL 0
//CSTART
step = 17
ELSE
ACC 50
CVEL homevel
CSTART
ENDIF
ELSE
CSTOP //CVEL 0
//CSTART
IF (home_dog==1) THEN
step = 17
ELSE
step = 18
ENDIF
ENDIF
ELSE
CSTOP //CVEL 0
//CSTART
ENDIF
ELSE
CSTOP //CVEL 0
//CSTART
step = 10
ENDIF
ENDIF
ЛД�����Ўў ЦчҝШPLCөДҫҺіМЮk·ЁЈә
ЦчҷCЦРкP(guЁЎn)УЪЯ\„УҝШЦЖІҝ·ЦөДЧУіМРтҝЙТФ°ҙИзПВЯүЭӢҝтҲDҫҺіМЈә
іМРтАэЈә
ЈЁВФЈ©
К№УГР§№ыЈә
ПөҪy(tЁҜng)ҢҚлHЯ\РРР§№ы·ЗіЈАнПл���Ј¬н‘‘Ә(yЁ©ng)ЛЩ¶Иҝм�����ЎўЛЩ¶ИЖҪ·Җ(wЁ§n)�����Ј¬НкИ«Я_өҪБЛҝШЦЖјјРg(shЁҙ)ТӘЗу�ЎЈНЁУГөДөӨ·рЛ№ЯhіМҝШЦЖЖчЯ_өҪБЛМжҙъҢЈУГPLCЯ\„УҝШЦЖДЈүKөДЧчУГЎЈFC302өДғһ(yЁӯu)®җРФДЬ�Ј¬ұЈХПБЛ¶ЁО»ҫ«¶ИЎЈУЙУЪЧФ¶ЁБxөДНЁУҚЯ^іМ”ө(shЁҙ)“ю(jЁҙ)���ЎўҝШЦЖЧЦ¶ЁБxЗеОъәҶқҚ����Ј¬ЦчҷCҝШЦЖіМРтй_°l(fЁЎ)ЧғөГёьИЭТЧБЛ����ЎЈ
ҪY(jiЁҰ)КшХZЈәК№УГОчйTЧУөДPLCјУОчйTЧУөДО»ЦГҝШЦЖДЈүKЈ¬ҫҺіМ•юКЗТ»ӮҖЖDҫЮ¶ш·ұҸН(fЁҙ)өД№ӨЧч�����Ј¬ө«КЗАыУГProfibus¬F(xiЁӨn)ҲцНЁУҚҝӮҫҖЦұҪУҝШЦЖҝШЦЖөӨ·рЛ№өДЯ\„УҝШЦЖЖч�Ј¬Ңў·ұҸН(fЁҙ)өДіМРт№ҰДЬҪ»ҪoЯhіМЛЕ·ю№ӨЧчХҫТФ·ЦІјКҪ·ҪКҪМҺАнЈ¬І»ө«ҝЙТФ№қ(jiЁҰ)КЎПөҪy(tЁҜng)іЙұҫ���Ј¬ЯҖҙуҙуМбёЯБЛХыҷCй_°l(fЁЎ)ЛЩ¶И���Ј¬ЦөөГФЪЧФ„У»ҜҝШЦЖоI(lЁ«ng)УтНЖҸVЎЈ